
I performed a PhD in computer science between 2014 and 2018, and defended July 2 2018. My thesis is entitled “Contextual integration of heterogeneous data in an open and opportunistic smart environment: application to humanoid robots” or “Intégration contextuelle de données hétérogènes dans un environnement ambiant ouvert et opportuniste : application aux robots humanoïdes” in Molière’s language. To shorten this magnificent title: I’m working on robots in smart homes from the point of view of data management and intelligence. I tackled numerous issues implied by the interaction of a robot and a smart environnement and rely on diverse technologies, including ontologies, reinforcement learning or hierarchical task planners.
The problematicof my thesis can be structured through a very simple and non innovative robot architecture:
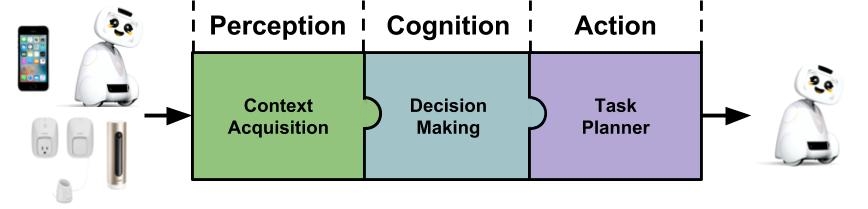
- Perception: The robot perceives its surrounding and uses the available devices to acquire the knowledge of the context. Yet, as data sources are not perfect, uncertainty is an issue. On top of that, context data are heterogeneous and the environment is open and non-static: robots can operate in various homes and each of them is different.
- Cognition: Based on the perceived knowledge of the context, the robot can reason and analyze it. By doing so, the robot aims to understand what is happening in the environment, including high level context data such as the user activity. This allows it to be aware of the situation and take a decision accordingly. However, achieving such a high abstraction of data within imperfect knowledge is a major challenge.
- Action: Once the robot has taken a decision, it performs actions to reach a goal. To do so, it uses a task planner to create a plan of actions and execute. However, as the environment is dynamic and its knowledge is not exhaustive, the generated plan can be faulty, leading to task failures. Preventing those is a open problem.
Consequently, I proposed several contributions covering perception, cognition and action. They enable robots to be more efficient and autonomous within smart environment. My contributions can be assembled to form a modular framework called FAIRIE.
You can find more about my work in the others pages. Don’t hesitate to contact me for further information or documents: nathan [dot] ramoly [at] free.fr (formerly nathan.ramoly@telecom-sudparis.eu)
I was awesomely supervised by Amel Bouzeghoub and Béatrice Finance.