
LEAF (Learning, Evaluating and Avoiding Failures) is an experience based approach to prevent task failures. It uses ontologies, multi-armed bandit (R-UCB), HTN and HRI.
General approach
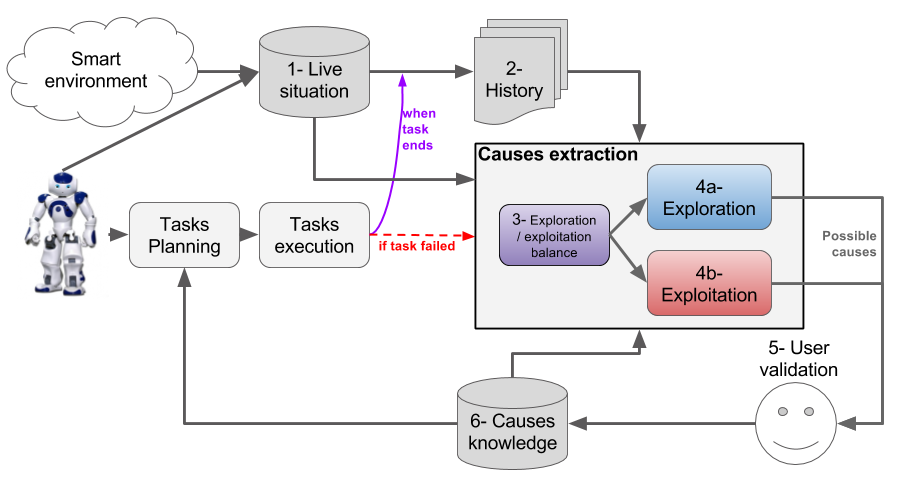
LEAF follows these steps: (be aware the numbers in the figure are not the order of execution)
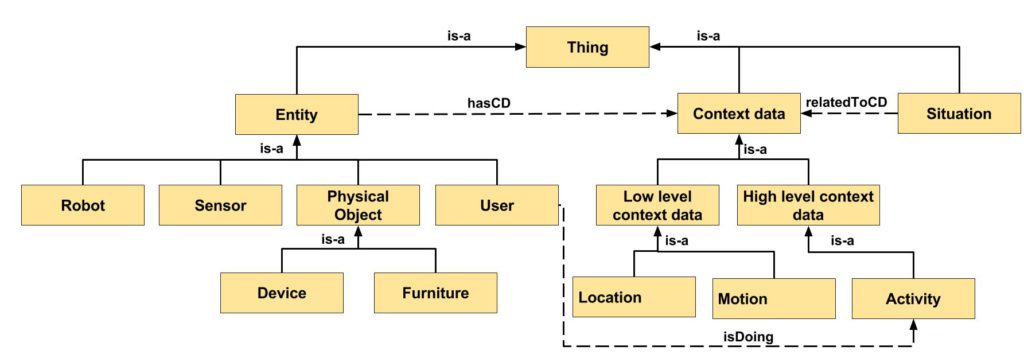
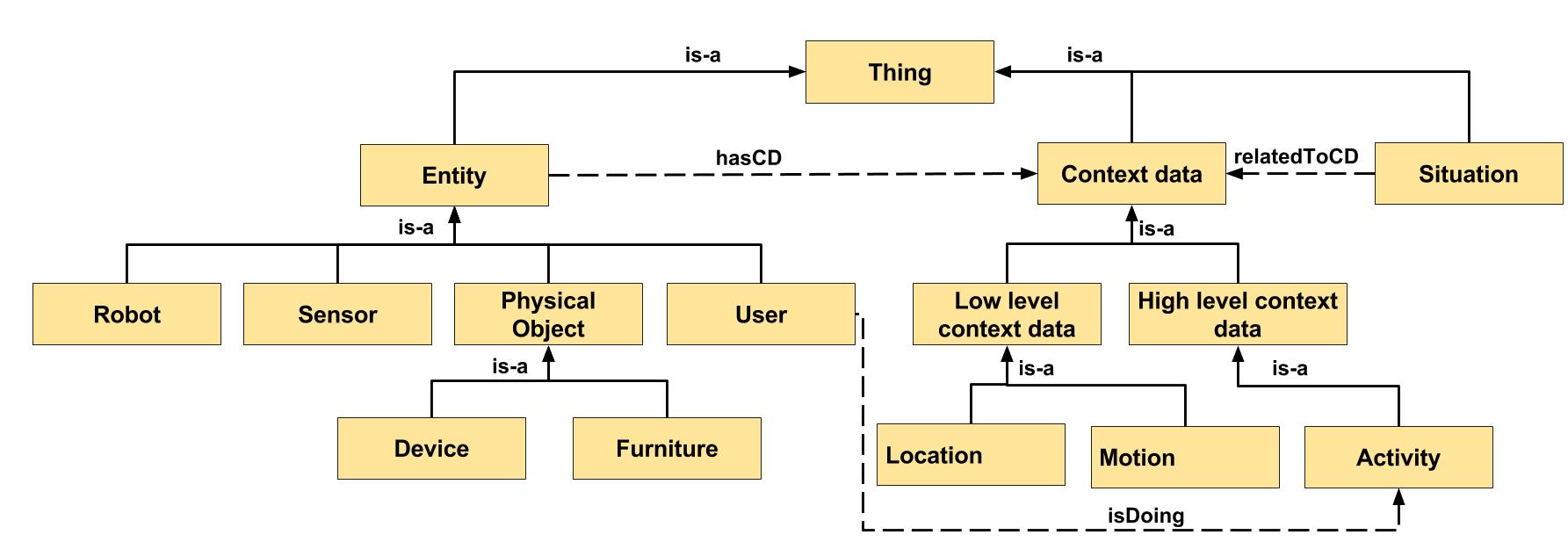
- The current situation (i.e. the set of all context data of the environment) is maintained as an ontology: the Live Situation (box 1 in figure). It is constantly updated as the perception layer provides new data. The structure of the used ontology is presented underneath.
- Whenever a task in the robot’s plan ends, the Live Situation is stored in the History (box 2). The History can be seen as a logbook of all encountered situations. A snapshot (i.e. a situation) is associated with the task that was occuring when it was acquired, and the outcome of the task.
- In case of a task failure, the robot starts the failure extraction process. To do so, it uses a multi-armed bandit solution to balance between discovery of new causes (exploration, box 4a) or consolidation of the already acquired Causes Knowledge (exploitation, box 4b). LEAF relies on an enchanced and adapted version of the R-UCB algorithm. Using this algorithm, and based on the History, LEAF selects some context data among the Live Situation that might be failure causes.
- Once it has extracted possible causes, the robot asks for user validation (5 in figure). In our experiments, it vocally asks the user, but other possibilities are possible, such as mobile applications. The user can provide an answer according to a scale of confidence.
- According to thus feedback, the cause is then associated to a weight and stored in the Causes Knowledge (box 6).
- The planner is adjusted to use the Causes Knowledge in the planning process. Whenver a cause is observed again, the associated task should be avoided.
Results
We tested LEAF on a generated dataset. The generator simulates the execution of one task that can encountered 4 different failure. We aim to see how quick LEAF learn by measuring the evolution of the correctness over the number of situations encountered. The correctness rate of failureless and most efficient task selection. We compared LEAF to a state-of-the-art statistic-based approach.
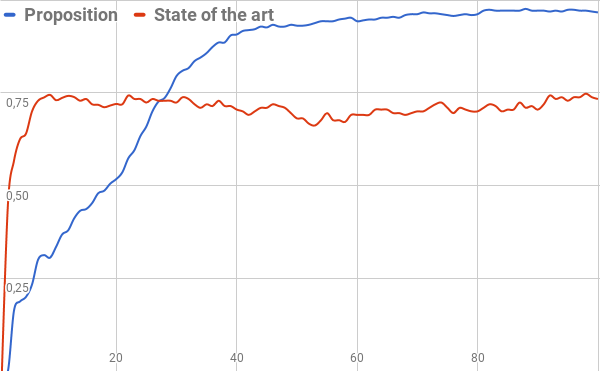
In (short) conclusion: LEAF leans slower as it relies on validation, but achieve a very high correctness, in other, LEAF trades correctness over time.
Videos
Illustrative videos:
- https://drive.google.com/file/d/0B-G4jmh6-FuTWklBQmhUME9NblE/view?usp=sharing
- https://drive.google.com/file/d/0B-G4jmh6-FuTY2dkX1E0UTA0T2M/view?usp=sharing
Experiments videos:
Publications
- Nathan Ramoly, Hela Sfar, Amel Bouzeghoub, Béatrice Finance, “LEAF: Using Semantic Based Experience to Prevent Task Failures”, Field and Service Robotics, 2017
- Nathan Ramoly, Amel Bouzeghoub, Béatrice Finance, “A Causal Multi-armed Bandit Approach for Domestic Robots’ Failure Avoidance”, International Conference on Neural Information Processing, 2017